Dynamic Positioning
When the JR is in deep water there is no such thing as anchor use! Currently, the JR is off the east coast of Greenland in water that is over a mile deep with a drill string winding its way down to the ocean floor and beyond. How does she stay in one place? With her Dynamic Positioning System.
The JR’s Dynamic Positioning (DP) System can use data from two different types of position systems in order to stay over a drill hole. The primary positioning system is GPS. There are three GPS systems on board that work to calculate the position of the ship. Each GPS system acts independently to triangulate the position and then the DP System averages those out to come up with the ship’s actual position. An older method that is still used as a backup to GPS is an acoustic beacon. The beacon is dropped overboard and sinks to the ocean floor where the ship needs

to remain. It sends out a signal that the ship’s hydrophones receive and these signals can be used by the DP System. This was once the primary positioning system onboard, but as GPS became more accurate and reliable, the beacons remain as an effective and reliable backup system.
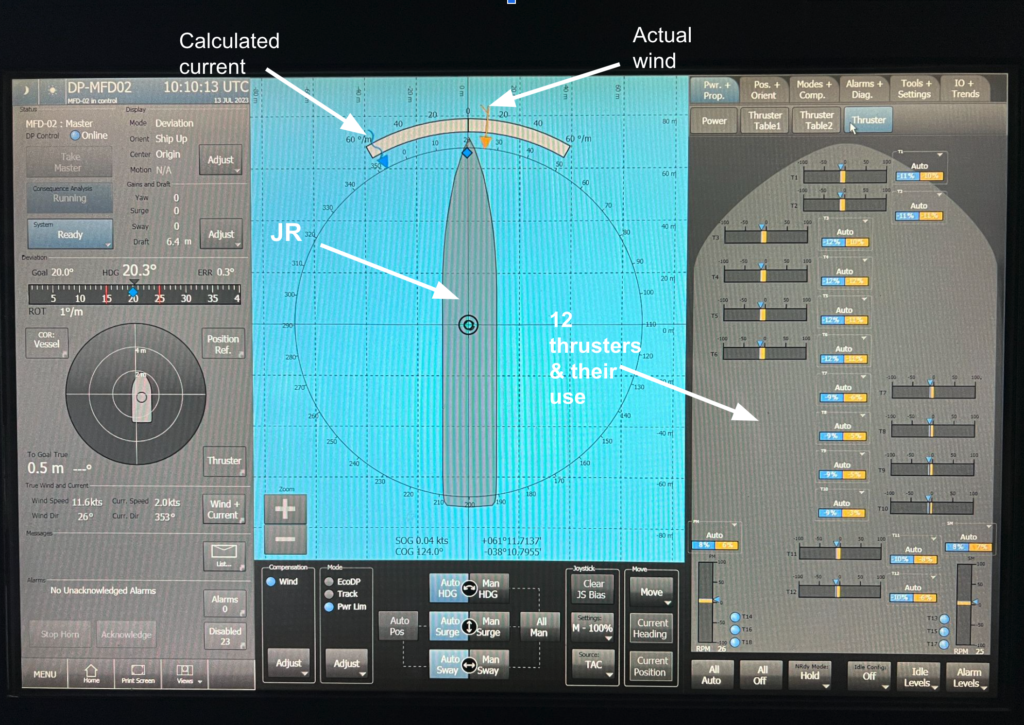
The DP system uses position data and other information to make a computer model of the ship in the water, and uses the desired location as a “home base”. The captain will set the direction of the bow (heading) based on wind direction, energy requirements, and the needs of the expedition, then the computer will use this information to send power to the required thrusters (the JR has 12) and to the two main propellers to maintain this heading and position. The heading may be chosen for fuel efficiency, but it could also be one that is more comfortable for everyone on board (time to think about sea-sickness), or advantageous to conducting drilling operations (think “heave” or up and down motion of the vessel and drill assembly).

But it is not that simple. There are other factors that the computer must take into account when keeping the ship steady. The wind direction and speed will affect how much energy the system will send to each of the thrusters for compensation. The wind is constantly being measured by anemometers on the ship. This information goes directly to the computer for immediate adjustments for any wind changes. Water currents, and other forces, are more difficult to measure on the ship, so the computer calculates a current estimate and uses that as data.
When we are drilling, the DP System operates similar to an auto-pilot, but unlike a land-based vehicle, the JR is in constant and sometimes severe motion. As waves make the ship pitch and roll, moving the GPS antennas (and hydrophones), the DP System might think that the ship is actually changing position. However, this type of motion is adjusted for by the DP computer, using Motion Reference Units (MRU) attached to the ship. There is also a fail-safe, or “dead reckoning” mode which will turn on if the ship loses all GPS input. It will work to maintain its current position as long as it can, even without the external data. This gives the captain time to figure out what is going wrong, and fix the problem.
This is one of the many systems that makes the JR a gem for ocean coring. And while most of the attention is being paid to the drilling and the core, all of these computations are going on in a tiny room on the bridge. It is this system that makes it possible for the JR to send miles of drill pipe into the ocean floor and pull up the secrets of the past, present, and future in the form of core.